
Analysis on Mitigation of Intelli-drive Communication Congestion: Broadcasted Signal Phase in Vehicle-to-Vehicle (V2V) Safety Features Using DSRC IEEE 802.11p Standard
American Journal of Computing Research Repository. 2017, 5(1), 1-13. DOI: 10.12691/ajcrr-5-1-1. Published online: June 22, 2017
Abstract
1. Overview of DSRC Study
DSRC would “support safety-critical communications especially collision warnings, as well as other valuable ITS applications such as Electronic Toll Collection (ETC), digital map update, etc.” . One researcher also noted that the “versatility of DSRC greatly enhances the likelihood of its deployment by various industries and adaptation by the consumers”.
The traffic flow improves and this leads to the reduction of congestion and ultimately collision of vehicles is reduced. Safety technology has always been an important concept of vehicle manufacturers and this has developed rapidly since NHTSA began regulating the auto industry. According to studies by NHTSA, it is believed that “vehicles protect occupants much better in the event of a crash due to advanced structural techniques propagated by more stringent crashworthiness standards, and some crash avoidance technologies are now standard equipment”.
Looking at vehicular crashworthiness and required crash avoidance technologies, researchers like 5, 6 believed that motor vehicles are safer now than before. However, a “significant number of annual crashes remains that could potentially be addressed through expanded use of more advanced crash avoidance technologies” . Even at this rate of annual crashes, it is generally believed that technology can help drivers avoid crashes. The purpose of this study is to assess safety communication of vehicle-to-vehicle features and test this communication technologies using a simulation experiments configured on wireless network at the routing layer to test the ability to mitigate V2V communication congestion which has always been an impediment to the implementation that support transition from a prototype-level to a deployment-level system.
For the purpose of this study, the vehicle-to-vehicle (V2V) is analyzed. It was indicated in the “Standards Committee E17.51 which endorses a variation of the IEEE 802.11a MAC for the DSRC link”, that also that “DSRC supports vehicle speeds up to 120mph, nominal transmission range of 300m (up to 1000m), and default data rate of 6Mbps (up to 27Mbps)”.
The objectives of even adopting this technology will provide two-way advantage – to vehicle manufacturer and to drivers. According to 6, “the technology could warn drivers of impending danger so that the driver can take corrective action, or may even be able to intervene on the driver’s behalf”, thereby, reducing deaths, injuries, and economic losses resulting from motor vehicle crashes by setting and enforcing safety performance standards for motor vehicles and motor vehicle equipment 5. It also helps vehicle manufacturers in building safer vehicles.
Variables to test will include vehicular safety performances and the learning orientation for high-tech safety measures while the independent variables include new safety measures and improved technology.
2. Problem Statement
3. Research Methodology
MAT-LAB was used for simulation. In the coding, one of the vehicles will be related to as either a ‘master’ or as a ‘slave’, in order to determine the speed change as vehicles cross on the roads. This represents a simulation based research in which V2V communication technology is tested, in order to mitigate V2V communication congestions which represents one of the problems inherent in DSRC. The ability to mitigate this congestion allows for safety features of reducing collisions in vehicles on the road. Keeping this in mind, “simulation is a method in which analysis of real life is to be done on software. Therefore, by choosing appropriate method, simulation models are obtained”
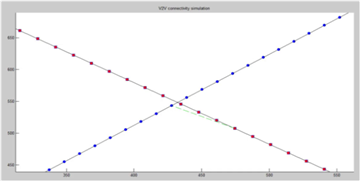
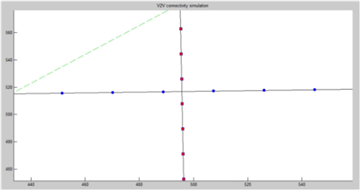
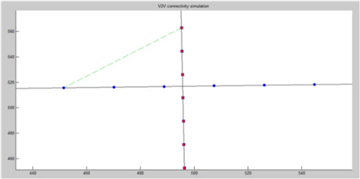
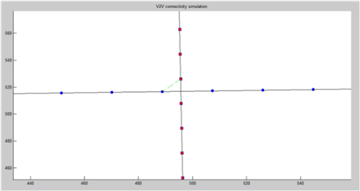
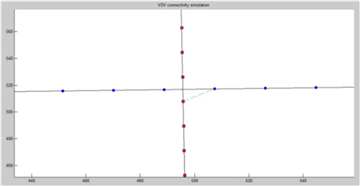
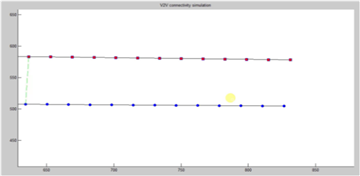
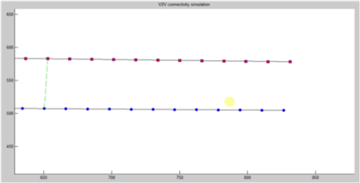
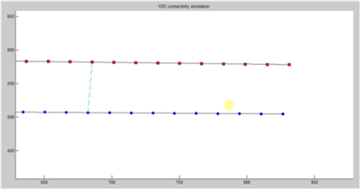
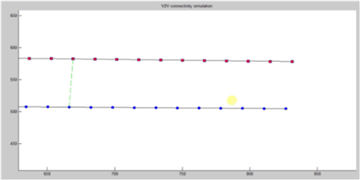
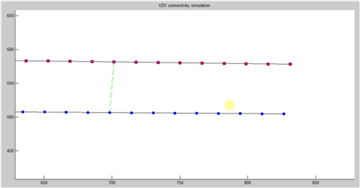
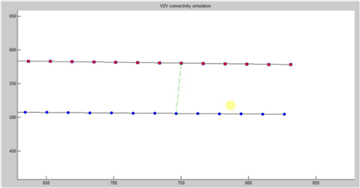
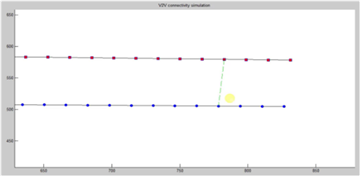
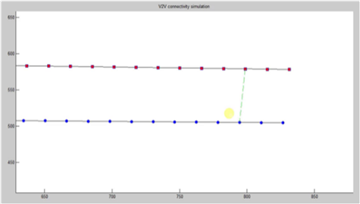
Two roads crossing each other at different angles are shown in different scenarios, representing vehicles crossing each other using MAT-LAB simulation. The simulation concept integrates:
a. Both microscopic traffic and realistic models of the communication channel which also include implementation of the DSRC architecture,
The simulation also shows that “the new DSRC offers the potential to effectively support vehicle-to vehicle and vehicle-to-roadside safety communications, which has become known as Vehicle Safety Communication (VSC) technologies”
The limitation of this study is the inability to use Mat-lab to create ‘DSRC Carsim” in the wireless network layer to pin-point the DSRC point of communication
4. Routing Protocols
The state of the art in Inter-vehicular communication (IVC) is experimented using frequency range within DSRC 5.9GHz as allocated. Communication via satellite general positioning systems (GPS) is proposed as antenna links for all vehicle communications; since vehicles are moving objects, so volatile link quality is needed. Moreover reactive on demand protocols are used as these are activated when needed. Time-Division Multiple Access (TDMA), Frequency-Division Multiple Access (FDMA) and Code-Division multiple Access (CDMA) are all difficult to use in this experiment, as these are best for still application 1. So the “multiple access protocol at the datalink layer which proposes how multiple terminals access the medium without interference or collision” known as ‘ALOHAnet’ and Carrier Sense Multiple Access (CSMA) are best protocols used and as our communication is broadcast and not unicast, the use of Request to send and Clear to send (RTS/CTS) is beyond the implementation plan in this experiment.
In real life, the High Performance Radio LAN which is the Wireless LAN Standard and the European alternative for the IEEE 802.11 standards (HIPERLAN) and the black burst which is the analog signal used in broadcasting are designed to support quality of service across IP networks which is an increasingly important aspect of Enterprise IT infrastructure (QoS). But these two protocols have no method to combat the hidden terminals
Using the Contention-based Channel Access, which is the Enhanced Distributed Coordination Function (EDCF), performance can be evaluated by increasing the overall system throughput, allow the probability of collision to be large. This represents the choice of Distributed coordination function (DCF), which is the fundamental MAC technique of the IEEE 802.11 based WLAN standard, thus allowing for attaining quality of service (QoS) 8. This does not indicate that quality of service (QoS) will also be attained with accuracy.
In view of this, a proper alteration is needed for QoS in real life scenario of transmission and broadcast. For example, each car has its own IP address on which it is identified. Then vehicles send their information via the IP address using the DSRC standard to establish communications. Such scenario was implemented in this study. DSRC ‘SIM card’ was not developed or experimented but assumptions were made to determine its functionalities.
5. Experiment (MAT-LAB Simulation) Setup
DELAY=0.5;
DELAY1=0.45;
[x1, y1] = ginput(2);
line(x1, y1,'color','black');
hold on;
[x2, y2] = ginput(2);
line(x2, y2,'color','black');
rnd_speed1=randi([10,20],1,1);
dist_first_line=sqrt((x1(2)-x1(1))^2+(y1(2)-y1(1))^2);
IP=[ % ip address for vehicles
50.18.212.157, %red
50.18.212.223] %blue
speed_new1 = round(dist_first_line / rnd_speed1);
rnd_speed2=randi([10,20],1,1);
dist_second_line=sqrt((x2(2)-x2(1))^2+(y2(2)-y2(1))^2);
speed_new2 = round(dist_first_line / rnd_speed1);
point1=linspace(x1(1),x1(2),speed_new1);
point2=linspace(y1(1),y1(2),speed_new1);
point3=linspace(x2(1),x2(2),speed_new2);
point4=linspace(y2(1),y2(2),speed_new2);
first_vehicle=plot(point1, point2,'s','MarkerFaceColor','red');
second_vehicle=plot(point3, point4,'o','MarkerFaceColor','blue');
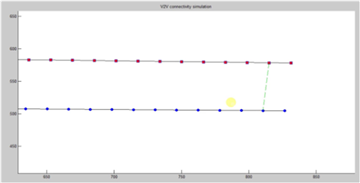
title('V2V connectivity simulation');
for i=1:1000
t = tcpclient('IP',Port)
t = tcpclient('IP',Port,'Timeout',
t=tcpclient('IP',Port,'ConnectTimeout',
for k = 1:speed_new1
first_vehicle.XData = point1(k);
first_vehicle.YData = point2(k);
second_vehicle.XData = point3(k);
second_vehicle.YData = point4(k);
plot(point1(k),point2(k),point3(k),point4(k));
vehicle_dist=[point1(k), point2(k);point3(k), point4(k)];
distance1= pdist(vehicle_dist,'euclidean');
If distance1<=100
line1 = plot([point1(k), point3(k)],[point2(k),point4(k)],'--','color','green');
pause(0.3);
set(line1,'Visible','off');
batchFiles = dir('PathToBatchfiles\*.m');
for i=1:length(Routing)
run(fullfile('Routing', batchFiles(i).Routing));
end
Routing [NewEvents] = action(50.18.212.157, 12);
Routing [NewEvents] = action(50.18.212.223, 13);
end
pause(DELAY1);
t = tcpclient('50.18.212.157', 12,'ConnectTimeout', 30)
t = tcpclient('50.18.212.223 ', 13,'ConnectTimeout', 30)
end
set(first_vehicle,'Visible','off');
set(second_vehicle,'Visible','off');
end
hold off;
axis([0 1000 0 1000]);
2. To take data or input from user for line 1, this is provided by user at start of simulation
[x1,y1] = ginput(2);
3. To draw the line (Road 1) Data provided for road 1
line(x1,y1,'color','black');
4. To take input from user for line 2 line, this is also provided by user at start
[x2,y2] = ginput(2);
5. To draw the line (Road 2) Data provided for road 2
(x2,y2,'color','black');
6. For all the values in linspace
for k = 1:speed_new1
7. First vehicle's x co-ordinate/X-coordinate data
first_vehicle.XData = point1(k);
8. First vehicle's y co-ordinate/Y-coordinate data
first_vehicle.YData = point2(k);
9. Second vehicle's x co-ordinate/X-coordinate data
second_vehicle.XData = point3(k);
10. If the distance is within 200 m/distance variable to check whether vehicles are in the radius of 100 meter or not
if distance1<=100
11. Show connectivity between two vehicles and pause of 0.45/Data or formula used to show connectivity on simulation
line1=plot([point1(k),point3(k)],[point2(k),point4(k)],'--','color','green');
pause(0.3);
set(line1,'Visible','off');
end pause(DELAY1);
12. Load the routing file which rubs for loop
13. These are used to route the MAT-LAB functions with IP Routing layer is formed due to which it tests the ability to mitigate V2V communication congestion.
t = tcpclient('50.18.212.157', 12, 'ConnectTimeout', 30)
t = tcpclient('50.18.212.223 ', 13, 'ConnectTimeout', 30)
batchFiles = dir('PathToBatchfiles\*.m');
for i=1:length(Routing)
run(fullfile('Routing', batchFiles(i).Routing));
end
14. Defines IP and port number of each car
Routing [NewEvents]= action(50.18.212.157, 12);
Routing [NewEvents] = action(50.18.212.223, 13) ;

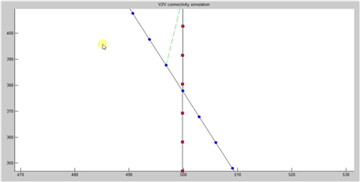
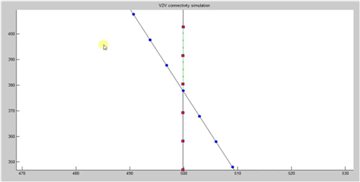
6. Vehicle Mobility Performance Comparison

In Figure 2 below, our simulation shows two vehicles with blue and red approaching each other. In Figure 3, below is the screenshot. From the image, it can be seen that speed of blue car decreases and that of the red car increases as it crosses the road without collision.






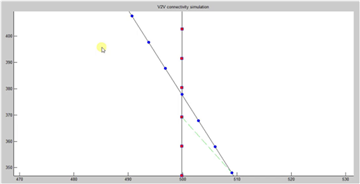
7. Conclusion
As vehicles follow each other’s instruction and as one of them becomes slave and other master, it could be seen that vehicles crossed without any collision due to speed difference. Although, DSRC VEHICLESIM was not implemented based on MAT-LAB’s decreased functionality on this, the results from the experiment demonstrate the need for network data prioritization for safety-critical applications. The future use of vehicular networks offers a tremendous opportunity for safety measures as DSRC may provide better communication standard for flow of traffic as a result of which congestion of traffic decreases, collisions avoided and crashes stopped.
References
Armstrong. Lee (2007) Dedicated Short Range Communications (DSRC) home, retrieved from http://www.leearmstrong.com/dsrc/dsrchomeset.htm.
Myung, H. G., Lim, J., & Goodman, D. J. (2006). Single carrier FDMA for uplink wireless transmission. IEEE Vehicular Technology Magazine, 1(3), 30-38.
Davis, J. P., Eisenhardt, K. M., & Bingham, C. B. (2007). Developing theory through simulation methods. Academy of Management Review, 32(2), 480-499.
Kenney, J. B. (2011). Dedicated short-range communications (DSRC) standards in the United States. Proceedings of the IEEE, 99(7), 1162-1182.
Musse, S. R., Jung, C. R., Jacques, J., & Braun, A. (2007). Using computer vision to simulate the motion of virtual agents. Computer Animation and Virtual Worlds, 18(2), 83-93.
Kosch, T., Kulp, I., Bechler, M., Strassberger, M., Weyl, B., & Lasowski, R. (2009). Communication architecture for cooperative systems in Europe. IEEE Communications Magazine, 47(5).
Weitfield C. (2003) Simulation techniques for the performance evaluation of DSRC systems; retrieved: http://www.wirelesscommunication.nl/reference/chaptr01/dtmmsyst/dsrc/dssr10.htm.
Nag, A., Biswas, S., Sarkar, D., & Sarkar, P. P. (2011). A novel technique for image steganography based on DWT and Huffman encoding. International Journal of Computer Science and Security, (IJCSS), 4(6), 497-610.
Richmond Adebiaye (2017). Investigating IT Effectiveness: Perspectives Relative to Cultural Differentiation between IT Users and Service Providers; American Journal of Networks and Communications (AJNC), Science Publishing Group, 2017; Volume 6, Issue 3, June 2017, Pages: 54-61.
IEEE 802.11e/D4.0 (2002), “Draft Supplement to Part 11: Wireless Medium Access Control (MAC) and physical layer (PHY) specifications: Medium Access Control (MAC) Enhancements for Quality of Service (QoS),” 2002.
Richmond Adebiaye, Haroun Alryalat, Theo Owusu (2016) Perspectives for Cyber-Deterrence: A Quantitative Analysis of Cyber Threats and Attacks on Consumers: International Journal of Innovative Research in Science, Engineering and Technology (IJIRSET) Vol. 5 Issue 7, August 2016. PP 01-18.
J. Zhu and S. Roy (2003). “MAC for Dedicated Short Range Communications in Intelligent Transporation System”. IEEE Communications Magazine, pages 60-67, 2003.
Qing Xu et al (2004) Vehicle-to-Vehicle Safety Messaging in DSRC. Source: DBLP Conference: Proceedings of the First International Workshop on Vehicular Ad Hoc Networks, 2004, Philadelphia, PA, USA, October 1, 2004.